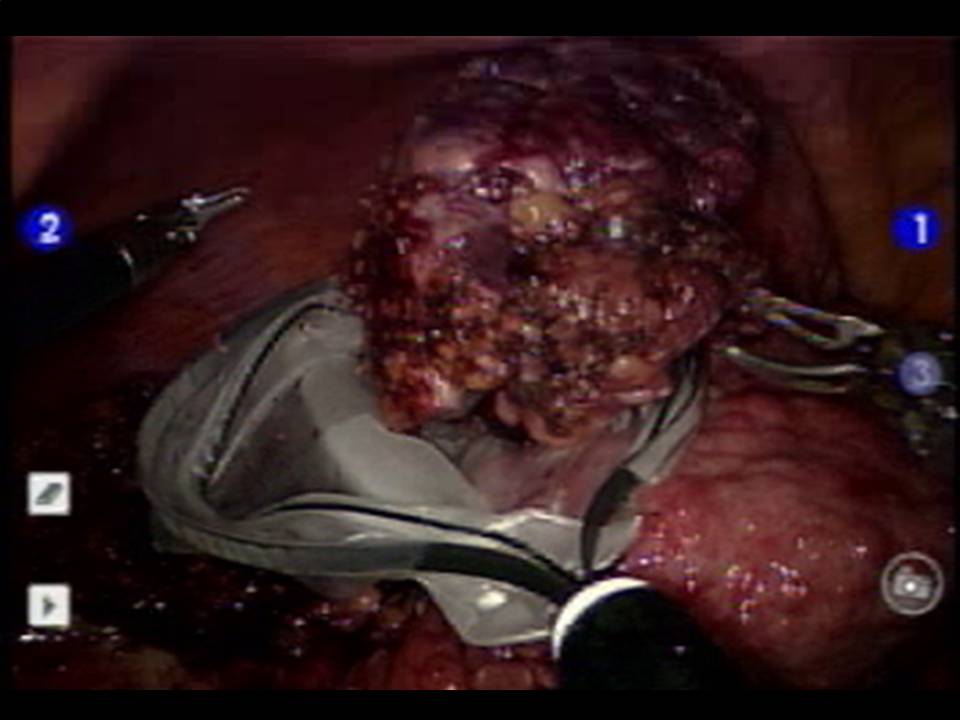
Cirurgia Robótica - Figura 2
Com o sistema robótico, o cirurgião tem visão tridimensional real do campo cirúrgico e seu posicionamento sentado com os braços apoiados lhe confere ótima ergonomia. Não há necessidade de paramentação cirúrgica. No console o cirurgião possui controle do posicionamento da câmera e de três braços automatizados. Por meio de pedais o cirurgião pode alternar o controle da câmera e dos três braços do robô. Assim a apresentação fica estática e não sujeita à fadiga ou falha do auxiliar. Nos momentos em que o cirurgião está utilizando os braços do robô, a câmera fica fixa e sem nenhum tremor. O terceiro braço tem a função de apresentação, mas pode ser utilizado como braço principal em casos de procedimentos que envolvem bilateralidade.